Mes Réalisations
Voici les projets techniques sur lesquels j'ai travaillé.

Bras Robotique (Universal Robots)
Programmation et mise en service d'un bras manipulateur collaboratif. Utilisation de l'interface Polyscope pour la logique séquentielle et spatiale.
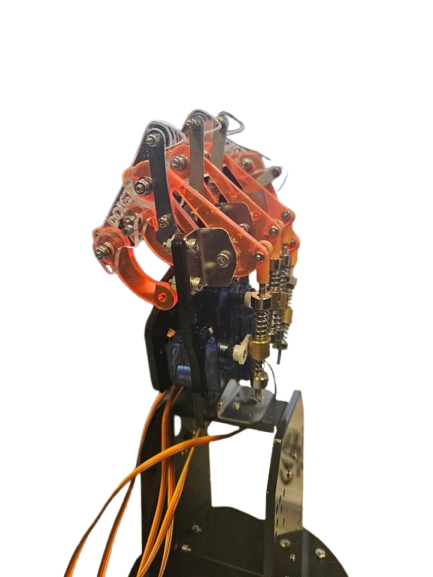
Main Robotisée (Hackathon)
Conception d'une main robotique contrôlée par capteurs de flexion. Projet réalisé en équipe de 6 sur 10h.
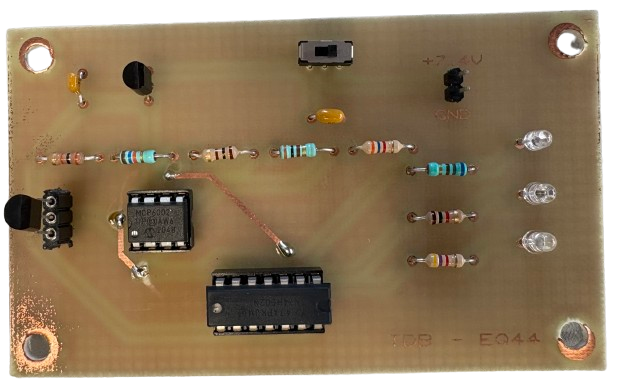
Thermomètre de Bain (SAE S1)
Réalisation d'un thermometre de bain pour bébé, notre projet du premier semesre en 40h.